惯性导航和组合导航的产品介绍
在现代社会,导航已经成为人们生活中不可或缺的一部分。无论是开车、骑车、步行还是乘坐公共交通工具,我们都需要准确的导航指引来找到目的地。而惯性导航和组合导航技术的出现,为我们提供了更加精准、智能的导航解决方案。
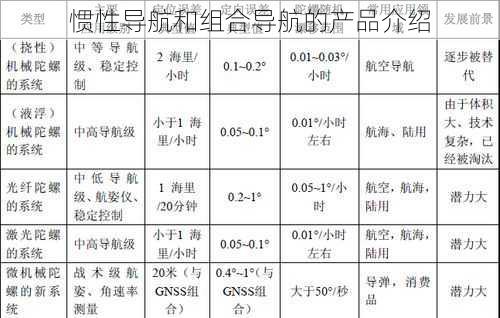
惯性导航是一种基于牛顿力学原理的导航技术,它利用陀螺仪和加速度计等惯性传感器来测量物体的运动状态,如速度、加速度和方向。惯性导航系统具有自主性强、不依赖外部信号等优点,能够在任何环境下工作,即使在没有卫星信号或其他外部导航源的情况下,也能提供准确的导航信息。惯性导航也存在一些局限性,如精度随时间积累而逐渐降低、容易受到外界干扰等。
为了克服惯性导航的局限性,组合导航技术应运而生。组合导航是将惯性导航与其他导航技术相结合,如卫星导航、地图匹配、视觉导航等,以提高导航的精度和可靠性。常见的组合导航系统包括惯性导航/卫星导航(INS/GNSS)组合、惯性导航/地图匹配(INS/MAP)组合等。
卫星导航是目前应用最广泛的组合导航技术之一。通过接收卫星发射的信号,卫星导航系统可以提供高精度的位置、速度和时间信息。INS/GNSS 组合将惯性导航的自主性和抗干扰能力与卫星导航的高精度相结合,能够在各种复杂环境下实现高精度的导航。例如,在城市峡谷、高楼林立的地区或恶劣的天气条件下,卫星导航信号可能会受到干扰或遮挡,而惯性导航则可以继续提供可靠的导航信息。
地图匹配是另一种重要的组合导航技术。它利用数字地图和车辆的实时位置信息,对车辆的行驶路径进行修正和优化。通过将车辆的实际行驶轨迹与地图进行对比,地图匹配可以消除由于道路施工、交通堵塞等因素导致的导航误差,提高导航的准确性和实时性。
视觉导航是近年来发展迅速的一种组合导航技术。它利用车载摄像头或其他传感器获取车辆周围的环境信息,并通过计算机视觉算法进行分析和识别。视觉导航可以提供丰富的道路信息,如车道线、交通标志和信号灯等,为车辆的自动驾驶提供重要的支持。
除了上述组合导航技术外,还有许多其他的组合导航方法和技术,如惯性导航/磁导航(INS/MAG)组合、惯性导航/雷达导航(INS/RADAR)组合等。这些组合导航技术的不断发展和创新,使得导航系统能够在各种复杂环境下实现更加精准、智能的导航。
在实际应用中,惯性导航和组合导航产品已经广泛应用于汽车、航空航天、航海、机器人等领域。例如,在汽车行业,惯性导航和组合导航系统可以帮助驾驶员实现自动驾驶、自适应巡航、自动泊车等功能;在航空航天领域,惯性导航和组合导航系统可以确保飞机的安全起降和精确导航;在航海领域,惯性导航和组合导航系统可以帮助船舶在复杂的海洋环境中准确航行。
惯性导航和组合导航技术的发展为我们的生活带来了巨大的便利和改变。它们的出现使得导航更加精准、智能,无论是在日常生活中还是在一些特殊领域,都发挥着重要的作用。随着技术的不断进步,相信惯性导航和组合导航技术将会有更广阔的应用前景,为我们的生活带来更多的惊喜和改变。